Two Bone IK
Applies simple IK to a short joint chain
UAnimGraphNode_TwoBoneIK
FAnimNode_TwoBoneIK
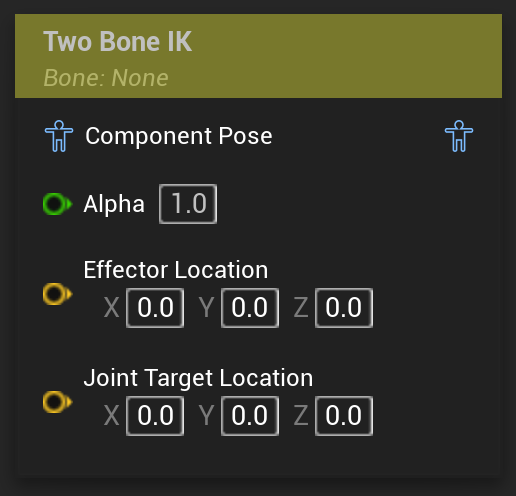
Applies an inverse kinematics solver to a 2-bone/3-joint chain, using a pole vector(Joint Target Location) and an effecto(IK Bone).
The IK is applied to the IK Bone and its two parent joints.
Optionally, the IK may stretch the joint chain once it reaches a certain extension to have the IK Joint reach the the Effector Location.
Both the Effector Location and the Joint Target Location can indpendently be set to operate in different spaces, which may make it easier to keep hands attached to an item or to an object in the world, for example.
If Allow Twist is disabled, the node will clear the rotation around a given Twist Axis.
This node comes with a dedicated editor mode that allows you to interactively modify the Effector Location and the Joint Target Location pole vector in the 3D viewport.
While you generally probably want these values to be driven by variables, this may come in handy when debugging or trying to visualize a certain result.
For this to work though, you need to disconnect any variables you may have connected in the AnimGraph. Otherwise, you will still see the gizmos to manipulate the vectors, but they will have no effect.